CV | Google Scholar | Github
I am an Assistant Professor at the School of Energy Engineering and Institute for Energy AI at KENTECH. Before joining KENTECH, I was a postdoctoral researcher at Bot Intelligence Group, Robotics Institute, CMU with Prof. Jean Oh. I obtained my Ph.D. and M.S. at KAIST, advised by Professor In So Kweon. I am a recipient of the Best Student Paper Award from WACV 2023, the 29th Samsung Humantech Paper Award, the 1st Place Award at 2024 CVPR WAD workshop, and the Best Poster Award at 2025 ICRA TIRO workshop. Also, I co-organized the “Thermal Infrared in Robotics” workshop at ICRA 2025 and the “Multi-spectral Imaging for Robotics and Automation” workshop at ICCV 2025.
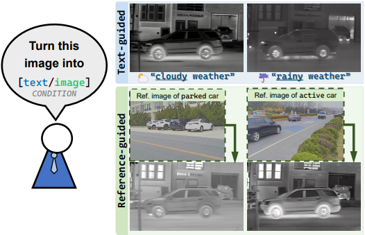
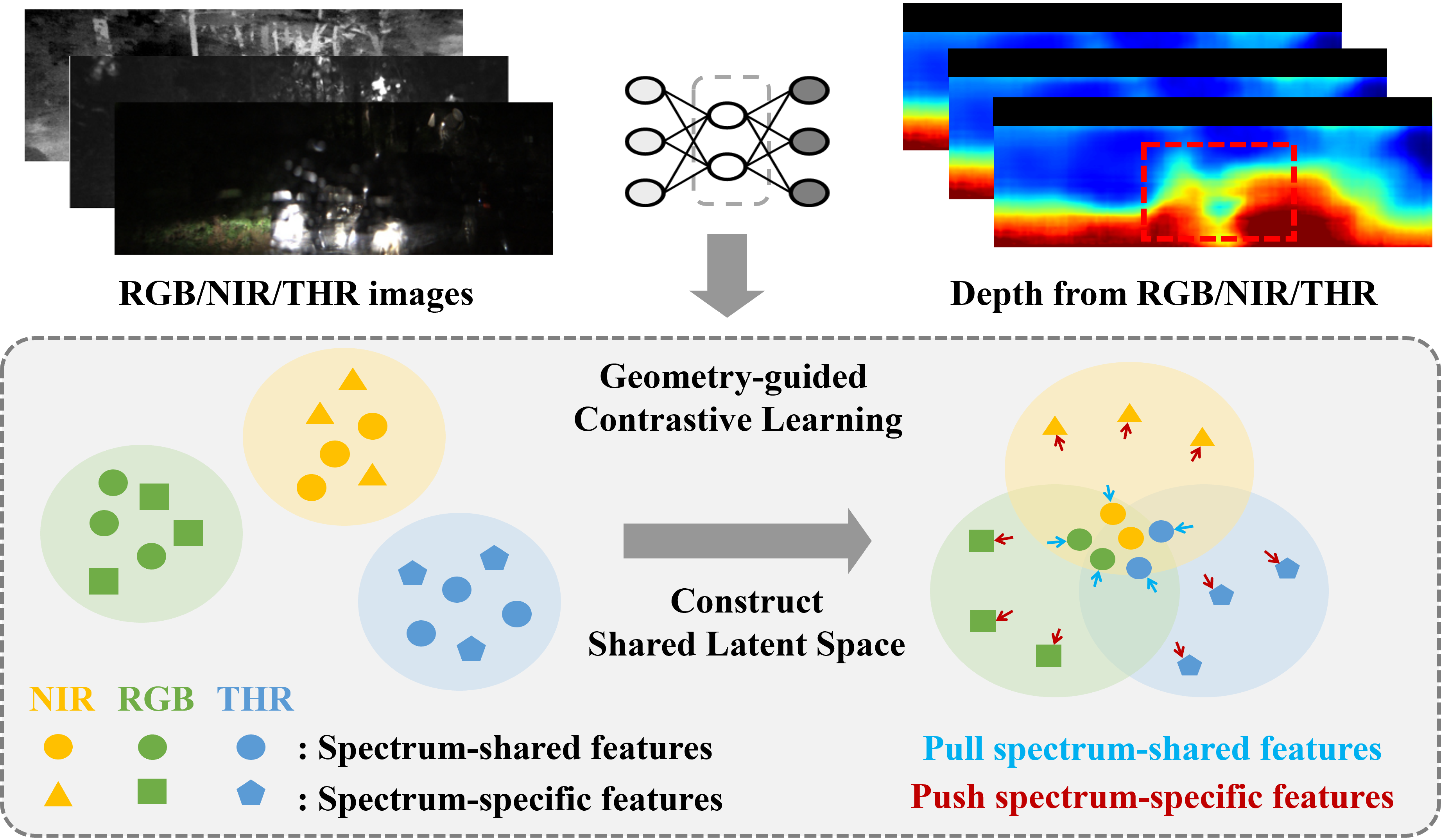
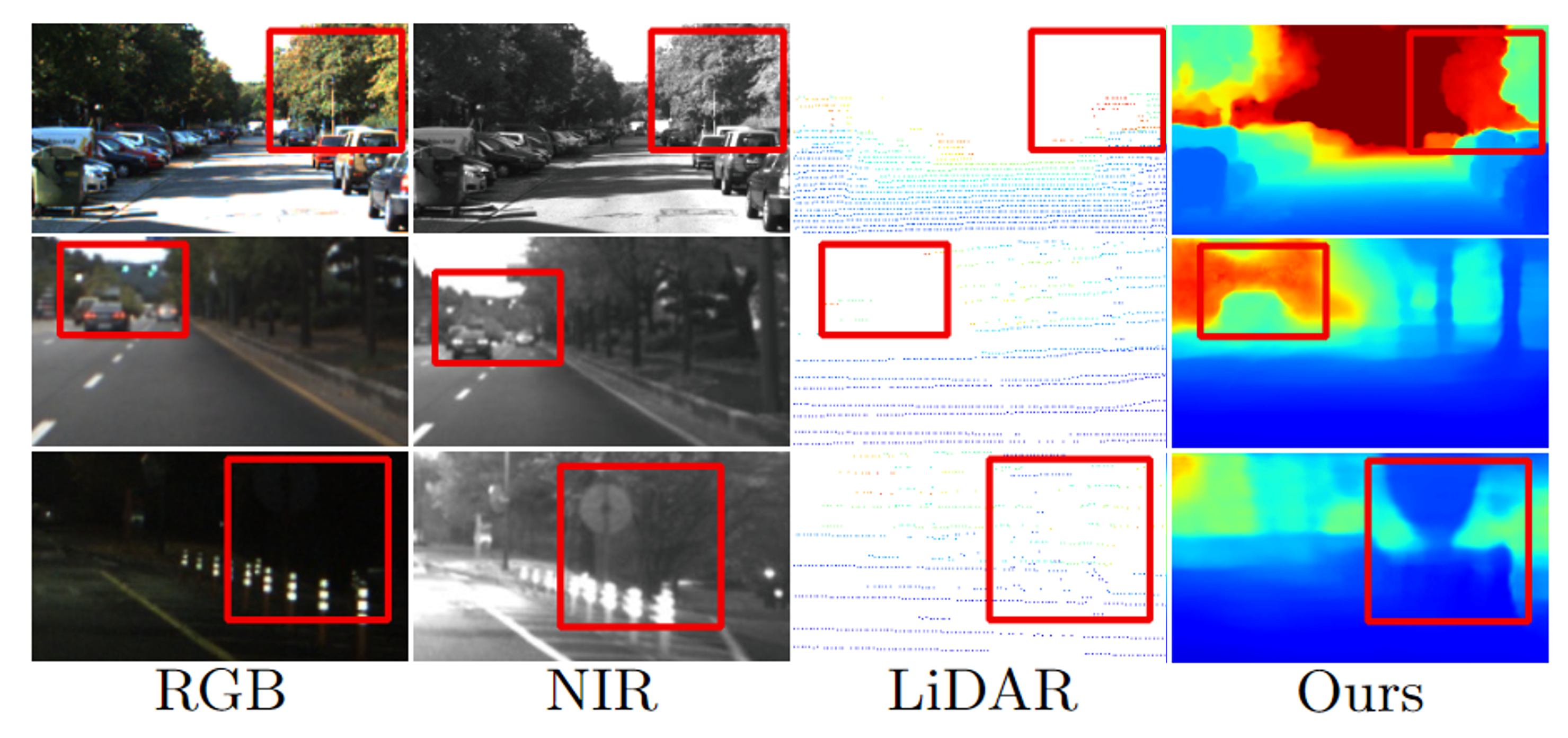
My research focuses on developing a robust physical AI that can perceive, understand, and navigate the dynamic world in challenging conditions, with a specific interest in spatial/semantic perception in extreme conditions, self-supervised learning, deep reinforcement learning, multi-sensor fusion, and vision-language navigation/manipulation. I am interested in the following areas, but also open to other explorable/challenging domains.
- Physical AI and Deep Reinforcement Learning for Robot/Sensor (legged robot, humanoid, camera)
- 3D Geometry in Challenging Conditions (rainy, snowy, over-exposed, low-lighted, etc)
- Unsupervised and Self-supervised 3D Geometry (depth, optical flow, odometry, SLAM)
- Learning Representation from Multi-modal Sensor and Self-supervision
- Vision-Language Navigation/Manipulation
[Link to RoBustLab]
Contact
-
shinwc159 [at] gmail.com
ushin [at] kentech.ac.kr
-
KENTECH, 21 KENTECH-gil, Naju-si, Jeonnam 58330, Republic of Korea
Education
-
Ph.D. in Electrical Engineering, KAIST, 2023
Advisor: Prof. In So Kweon
-
M.S. in Electrical Engineering, KAIST, 2019
Advisor: Prof. In So Kweon
-
B.S. in Electrical and Information Engineering, SNUST, 2017
Advisor: Prof. Byoung Wook Choi