I am a postdoctoral researcher at Robotics Institute, CMU. I obtained my Ph.D. and M.S. at KAIST, advised by Professor In So Kweon. I am a recipient of the Best Student Paper Award from WACV 2023.
My research focuses on developing a robust robot vision system that can perceive and navigate the dynamic world in challenging conditions, with a specific interest in self-supervised learning of 3D geometry and multi-sensor fusion. I am interested in the following areas, but also open to other explorable/challenging domains.
- Unsupervised and Self-supervised 3D Geometry (depth, optical flow, odometry, SLAM)
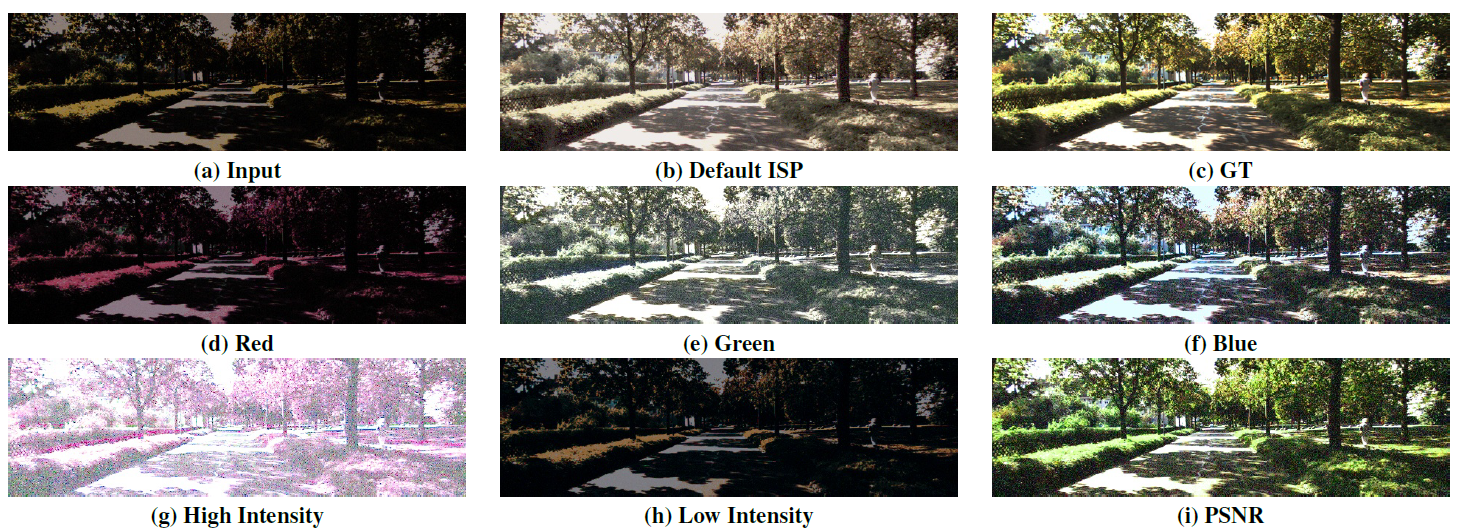
- 3D Geometry in Challenging Conditions (rainy, snowy, over-exposed, low-lighted, etc)
- Multi-modal Sensor Fusion
- Learning Representation from Multi-modal Sensor and Self-supervision
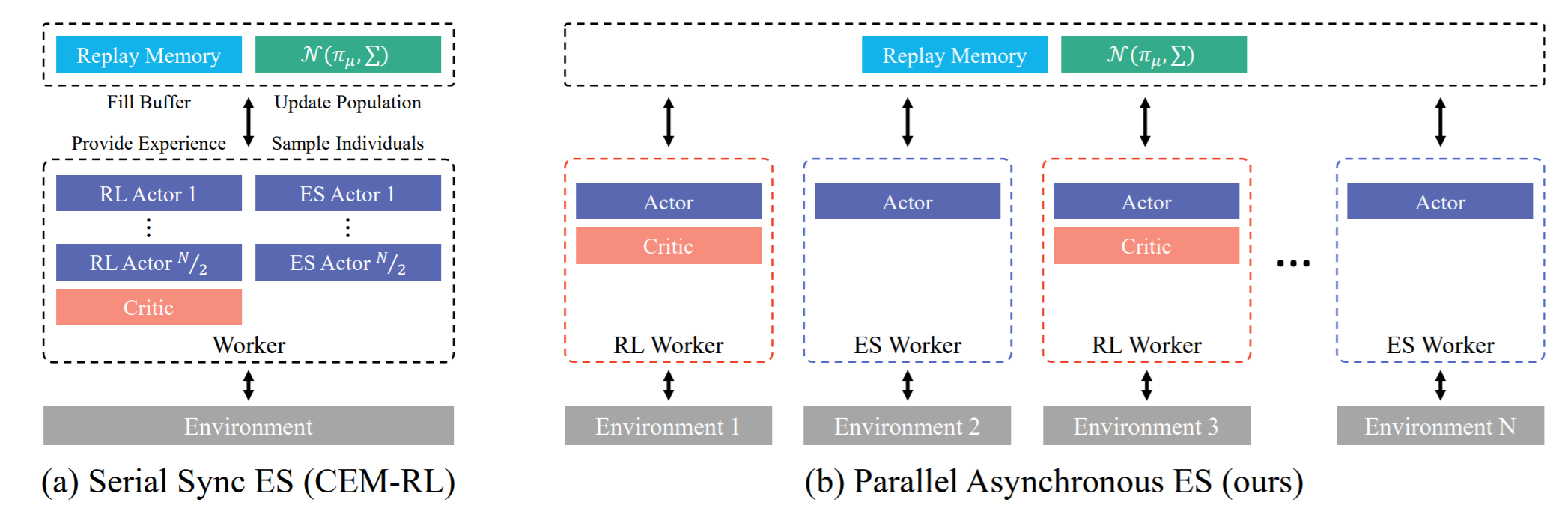
- Deep Reinforcement Learning
Contact
-
shinwc159 [at] gmail.com
ushin [at] andrew.cmu.edu
-
Robotics Institute, 1723 Murray Ave, Pittsburgh, PA 15217
Education
-
Ph.D. in Electrical Engineering, KAIST, 2023
Dissertation: "Self-supervised 3D Geometric Perception in Adverse Real-world Environment"
Advisor: Prof. In So Kweon
-
M.S. in Electrical Engineering, KAIST, 2019
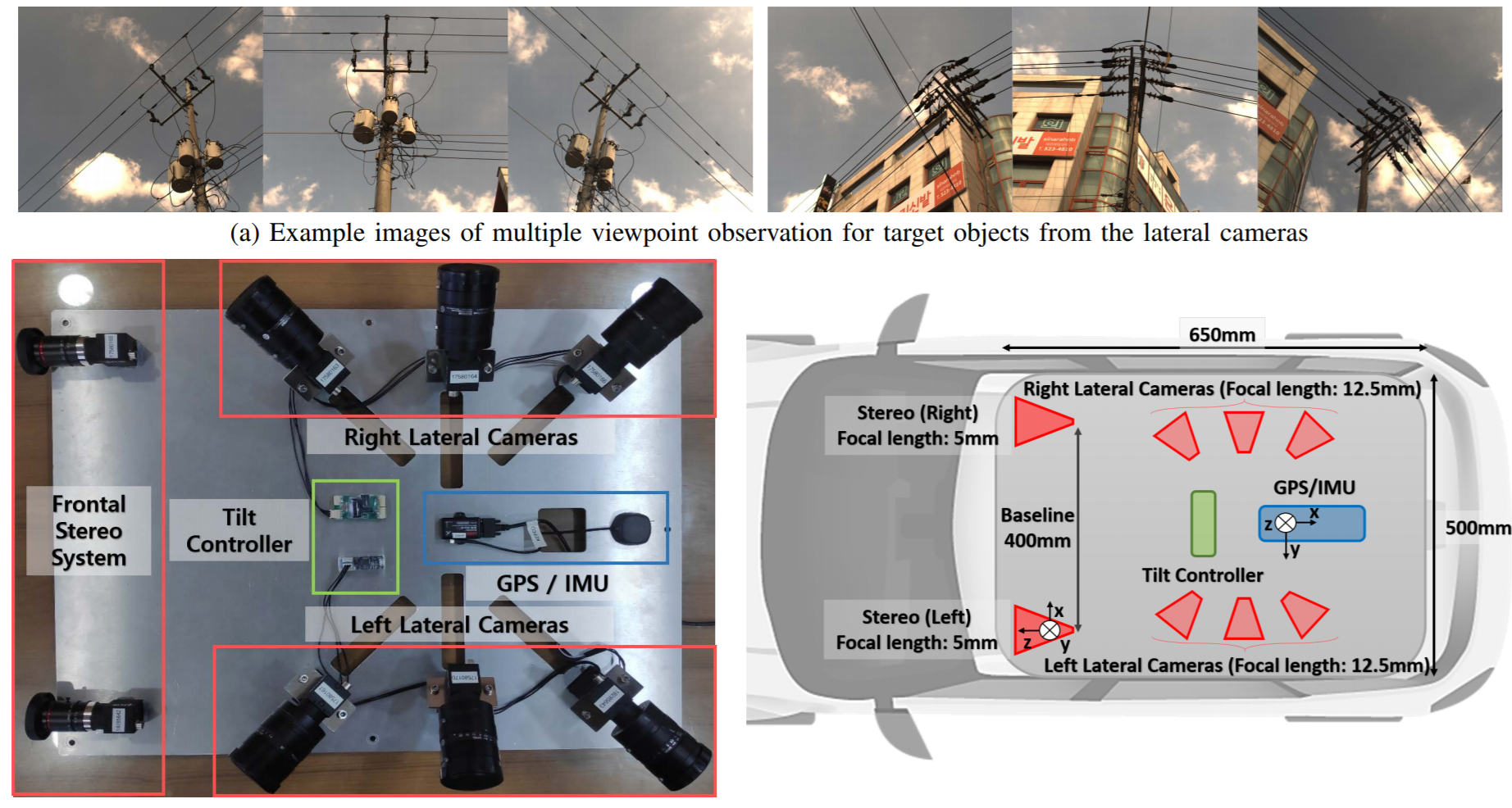
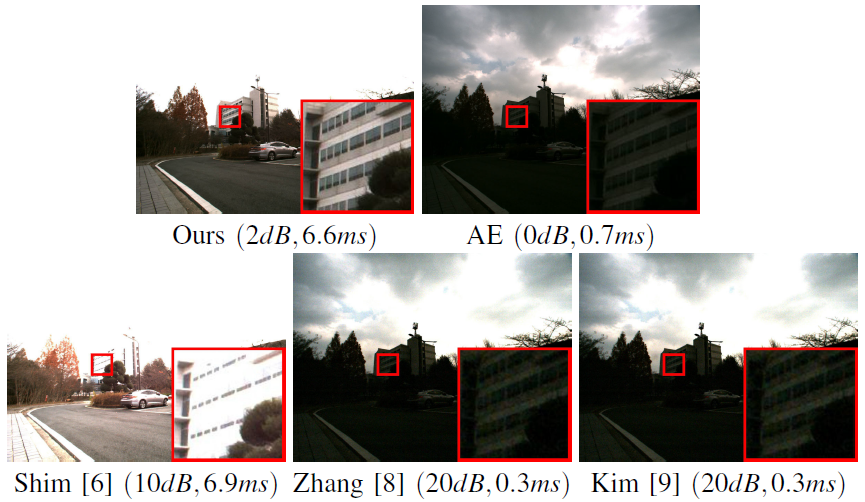
Thesis: "Noise-Aware Camera Exposure Control for Robust Robot Vision"
Advisor: Prof. In So Kweon
-
BS in Electrical and Information Engineering, SNUST, 2017
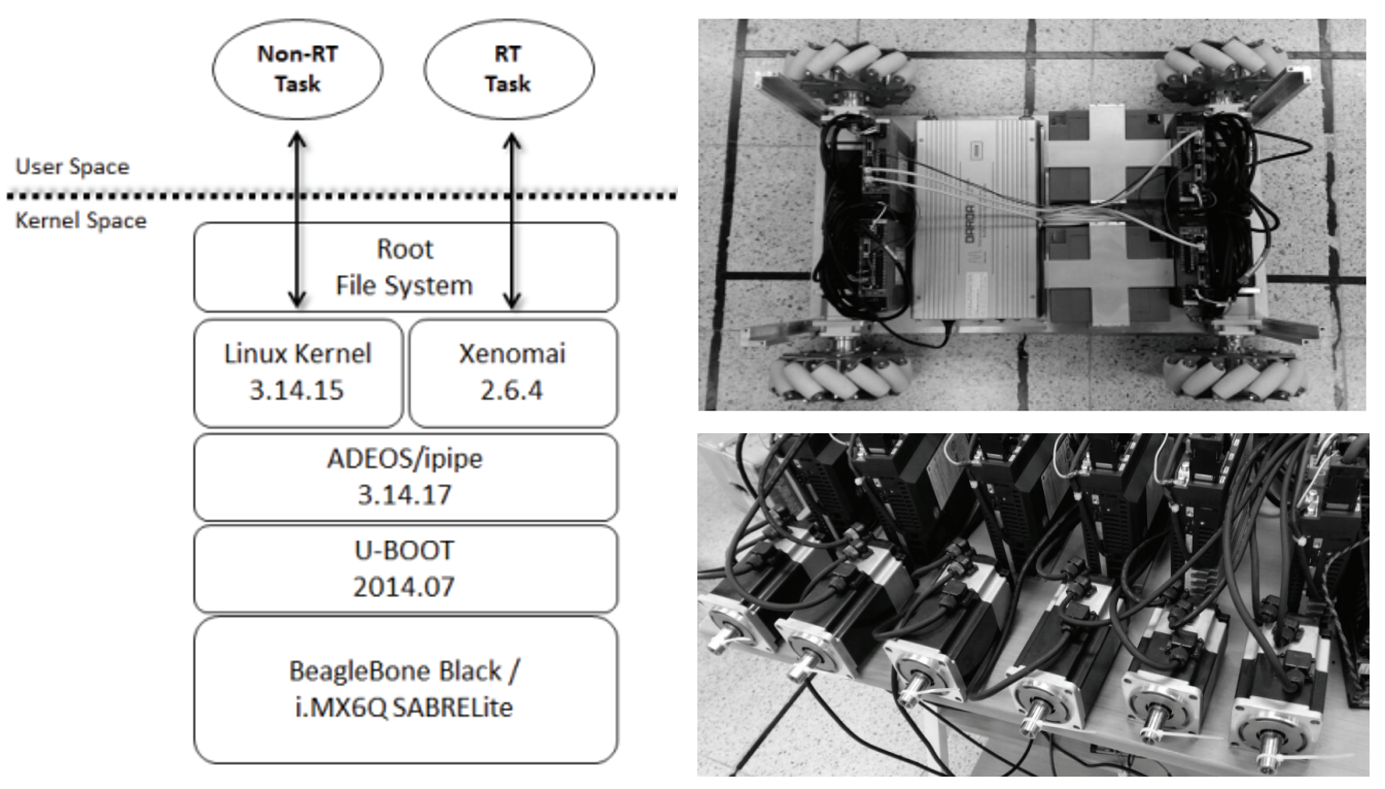
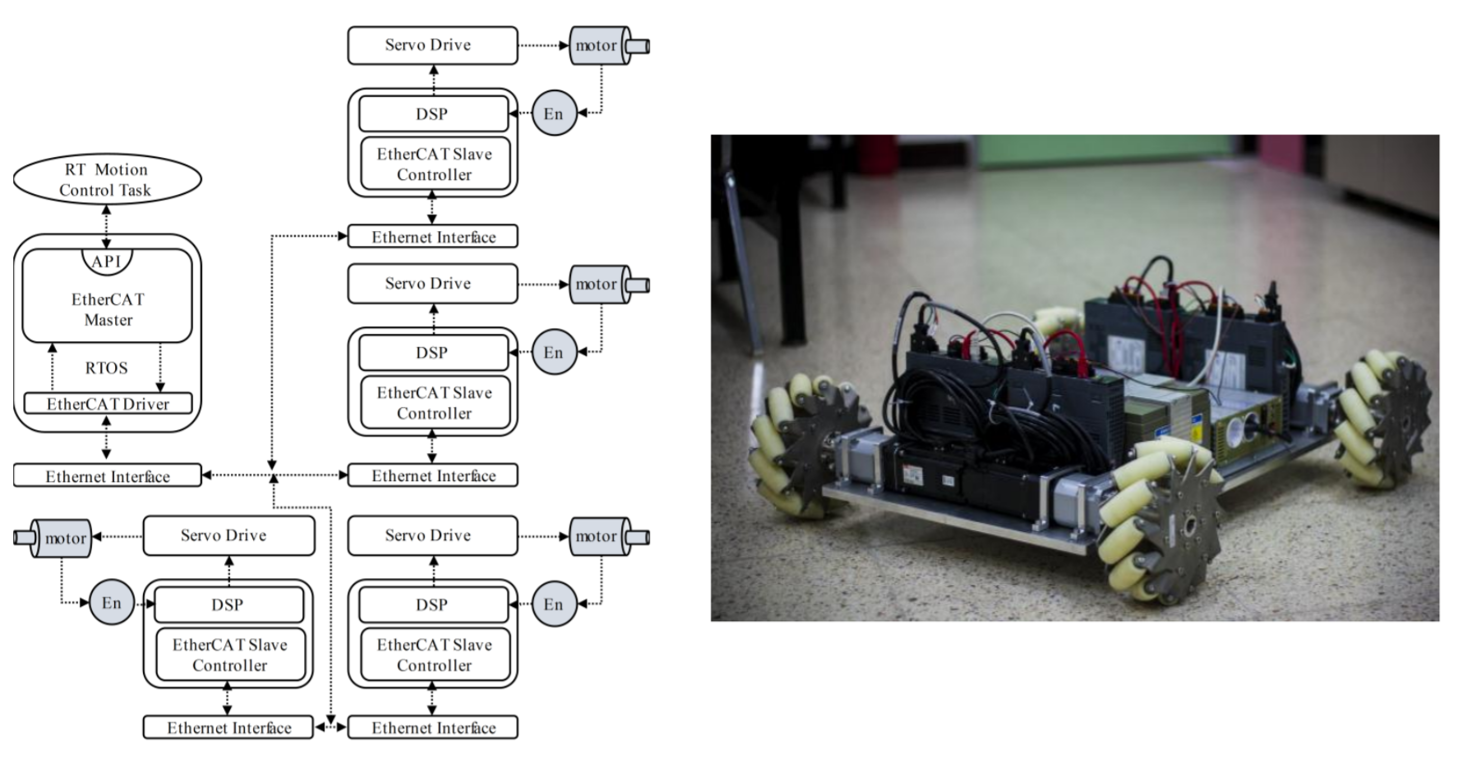
Project: "Real-Time Ethernet Protocol based Omni Directional Mobile Robot"
Advisor: Prof. Byoung Wook Choi